
PID 是 比例(Proportional)、积分(Integral)、微分(Derivative) 三个英文单词的缩写。它是一种用于 自动控制系统 的算法,能让系统按照设定目标值运行,并减少误差。PID 控制被广泛应用在工业控制、机器人控制、自动驾驶等领域。
1. PID 控制的基本概念
PID 控制是一种 反馈控制算法,它的目标是让系统的输出(如温度、速度、压力等)尽可能接近设定的目标值。PID 通过不断调整控制量(如电机转速、加热功率等),来减少系统误差。
举个简单的例子:
• 你在家里开了空调,把温度设定为 25℃(目标值)。
• 但是房间现在只有 20℃(当前温度)。
• 空调就会开始加热,让温度上升。
• 当温度达到 25℃ 时,空调会减少功率,避免温度过冲。
• 如果温度超过了 25℃(比如升到 27℃),空调会降低加热功率,甚至开始制冷,保持温度稳定。
这个过程就类似于 PID 控制,不断 检测误差 → 计算调整量 → 调节系统,直到温度稳定在 25℃。
2. PID 控制的三个部分
PID 控制器主要由 P(比例)、I(积分)、D(微分) 三部分组成,它们各有不同的作用。
(1)P:比例控制(Proportional)
作用:根据误差大小进行调整,误差越大,调整力度越大。
理解方式:
• 你开车时,发现车偏离了车道,你会马上转动方向盘调整,偏离越多,调整越大。
• 但是,如果 只用 P 控制,当误差变小时,调整力度也变小,可能会出现稳态误差(无法精准达到目标值)。
公式:
P_out = K_p*e
其中:
• P_out是 P 控制的输出
• K_p 是比例系数(调整力度)
• e 是当前误差(目标值 – 实际值)
举例:
• 假设你设定空调温度为 25℃,当前温度是 20℃,误差是 5℃。
• 如果 K_p = 2 ,则加热功率输出:
P_out = 2*5 = 10
• 如果当前温度升高到 24℃,误差变成 1℃,功率就减少:
P_out = 2 * 1 = 2
• 这样加热功率会越来越小,但可能无法完全达到 25℃,导致有 稳态误差。
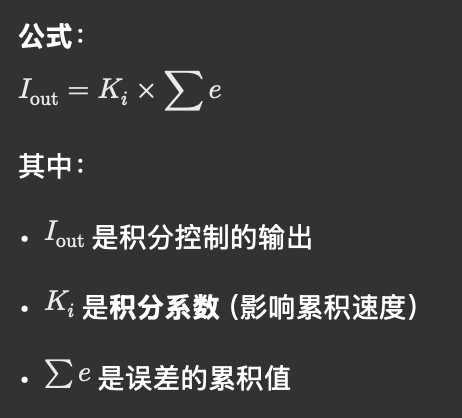
(2)I:积分控制(Integral)
作用:消除稳态误差,确保系统最终达到目标值。
理解方式:
• 如果你开车时发现自己一直偏向一侧(比如车总是偏右一点),你会 逐渐增加调整力度,直到车完全回到正中。
• 也就是说,积分控制会积累误差,如果误差长期存在,就会不断增加调整力度,最终让系统达到目标。

举例:
• 继续空调的例子,如果温度 长期 停在 24℃(比目标值低 1℃),P 控制的功率很小,不足以让温度升到 25℃。
• 积分控制会累计误差,逐渐增加功率,直到温度达到 25℃,误差归零。
问题:
• 如果 K_i 过大,可能会导致超调,温度超过 25℃,甚至震荡不稳定。
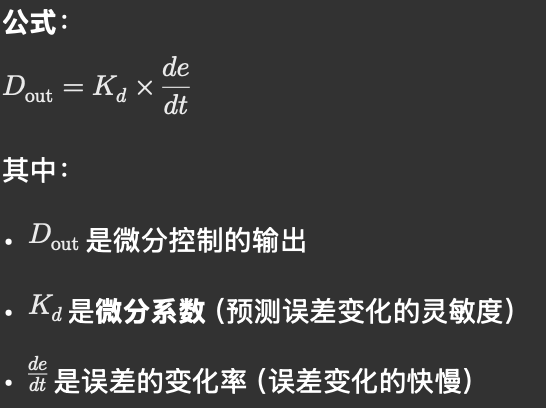
(3)D:微分控制(Derivative)
作用:预测误差变化趋势,提前做调整,减少超调。
理解方式:
• 你开车时,发现车快要偏离车道,你会提前轻微调整方向,而不是等完全偏离再调整。
• 也就是说,微分控制能提前感知误差的变化趋势,防止调整过度。
举例:
• 仍然是空调的例子,如果温度快速上升,即将超过 25℃,微分控制会提前减少加热功率,避免温度过冲。
• 这样可以让系统更平稳,不会温度忽高忽低。
问题:
• 如果 K_d 过大,系统对误差变化太敏感,可能会过度调整,导致振荡。
3. PID 结合使用
在实际应用中,一般不会单独使用 P、I、D,而是三者结合,形成 PID 控制:
{控制量} = P_out + I_out + D_out
不同应用可能会使用不同的组合:
• P 控制:简单但可能有稳态误差。
• PI 控制:适用于温度控制等不需要太快反应的系统。
• PD 控制:适用于需要快速反应的系统,如无人机姿态控制。
• PID 控制:最常见的方式,适用于大多数工业控制系统。
4. PID 控制的实际应用
(1)温度控制(如电热水壶、空调)
场景:
你设定空调温度为 25℃,但当前温度是 20℃。PID 控制可以:
• P 控制:根据误差 5℃,空调开始加热。
• I 控制:如果温度长时间没达到 25℃,功率会逐渐增加,避免稳态误差。
• D 控制:如果温度接近 25℃,但上升太快,空调会减少加热功率,防止超调。
效果:房间温度更平稳,不会忽冷忽热。
(2)自动驾驶(如无人车、无人机)
场景:
无人车需要沿着车道行驶,避免偏离目标路线。PID 控制可以:
• P 控制:当车辆偏离车道时,调整方向盘。
• I 控制:如果车长期偏向一侧,方向修正力度会逐渐增加。
• D 控制:预测偏差趋势,提前微调,防止剧烈摆动。
效果:行驶更平稳,减少蛇形走位。
(3)电机转速控制(如风扇、机器人)
场景:
你希望电机稳定运行在 1000 RPM(每分钟转速)。PID 控制可以:
• P 控制:当前转速低于 1000 RPM,增加电压。
• I 控制:如果转速长时间偏低,逐步增加补偿。
• D 控制:如果转速上升太快,提前减少电压,防止超调。
效果:电机运行更平稳,减少抖动。
5.结论
PID 控制是自动控制中最常用的算法,它能够让系统稳定、精准地运行。
• P 控制 让系统快速响应,但可能有稳态误差。
• I 控制 消除稳态误差,但可能导致超调。
• D 控制 预测误差趋势,减少超调,让系统更稳定。
总结
• 空调控温:保持设定温度,避免忽冷忽热。
• 无人车自动驾驶:确保行驶稳定,不偏离车道。
• 电机速度控制:让转速平稳,不忽快忽慢。
PID 控制让系统稳定、精准地运行,常用于温度控制、自动驾驶、电机调速等领域。
原创文章,作者:梦南圆,如若转载,请注明出处:https://mnyuan.cn/archives/17813
 微信扫一扫
微信扫一扫
