
1. 背景:为什么需要自适应控制?
在工程系统中(比如飞机、机器人、电机控制),我们经常会遇到这样的问题:
- 模型不准确:实际系统和理论模型有偏差,比如摩擦、空气阻力变化等。
- 参数不确定:比如一辆汽车载重不同,惯量就变了;飞机燃油消耗后质量变了。
- 环境变化:温度、湿度、材料老化都会影响控制效果。
如果使用传统 PID 控制 或者 固定参数控制器,性能可能会下降,甚至系统会不稳定。
所以我们希望有一种控制方法,可以自动识别系统的变化,并实时调整控制器参数,这就是 自适应控制。
2. 什么是自适应控制?
定义:
自适应控制是一类根据系统运行状态和环境变化,自动调整控制器参数的控制方法。
换句话说,它不像 PID 那样固定参数,而是能“边控制,边学习”,不断调节自己,以保证系统性能。
3. 自适应控制的核心思想
自适应控制一般包括两个部分:
- 参数估计(识别):在线实时估计系统的参数(比如质量、摩擦系数等)。
- 参数调整(控制律修正):根据估计的结果,调整控制器的参数,使得系统依然达到预期性能。
所以它就像开车时,你不用事先知道路面摩擦系数,而是通过“打方向盘—感觉车身反应—再调整方向”来实时适应。
4. 常见的自适应控制方法
常见的两大类:
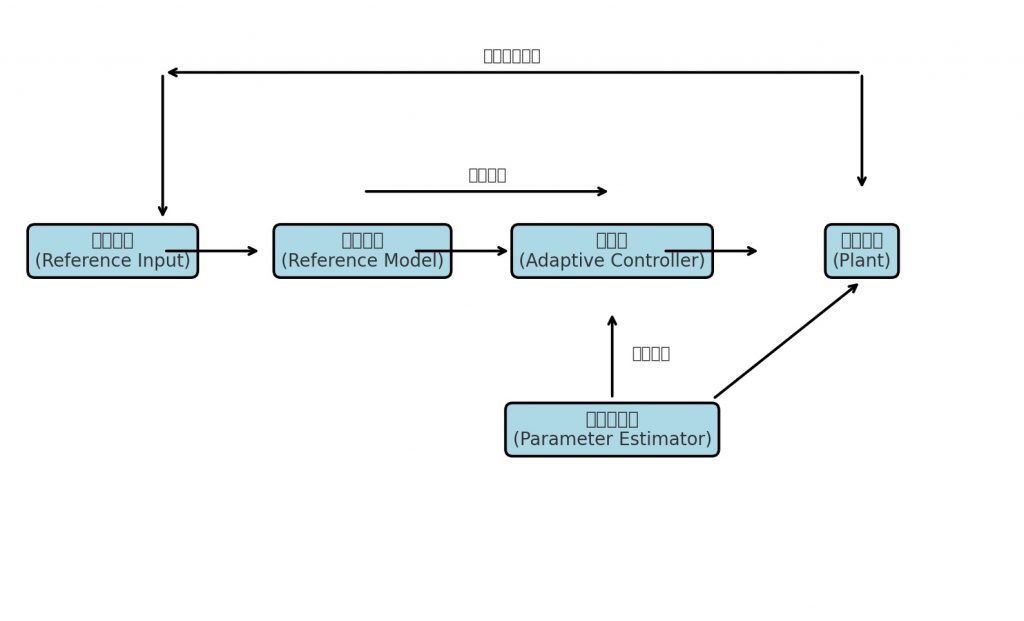
(1) 模型参考自适应控制(MRAC)
- 有一个理想模型,定义系统“应该”表现的样子。
- 控制器不断调整参数,使得实际系统的响应尽量跟这个参考模型一致。
- 例如:希望飞机的俯仰角变化像“理想模型”那样快又平稳,哪怕飞机重量变化。
(2) 自校正调节器(STR, Self-Tuning Regulator)
- 系统参数未知或会变化。
- 先实时估计系统模型参数,再用估计结果设计控制器。
- 常用于工业过程控制,比如锅炉温度控制、机器人关节驱动。
5. 自适应控制与常见方法的对比
| 方法 | 特点 | 局限性 |
|---|---|---|
| PID | 简单、常用、调参直观 | 参数固定,适应性差 |
| 鲁棒控制 | 针对最坏情况保证性能 | 保守,可能性能不最优 |
| 自适应控制 | 实时调整参数,性能更优 | 算法复杂,可能有稳定性风险 |
6. 生活中的类比
想象你骑自行车:
- 如果路面平整(系统已知),你用固定的踩踏频率就能骑稳。
- 如果突然上坡(系统参数变化),你会自动加大踩踏力度;下坡时又会放松。
- 这种“根据环境自动调节踩踏策略”的能力,就是自适应控制。
7. 总结
- 自适应控制是一种能根据系统和环境的变化,实时调整控制器参数的控制方法。
- 核心在于 识别 + 调整 两个环节。
- 典型方法有 模型参考自适应控制 和 自校正调节器。
- 优点:能在不确定环境中保持良好性能。
- 缺点:算法复杂,若设计不当可能失稳。

原创文章,作者:梦南圆,如若转载,请注明出处:http://mnyuan.cn/archives/18404
 微信扫一扫
微信扫一扫 