
一、PLC基础简介
**PLC(可编程逻辑控制器)**是一种用于工业自动化控制的数字计算机。它能够接收传感器的输入信号,根据事先编好的程序进行逻辑判断与运算,输出控制信号,控制设备如电机、阀门、灯、继电器等。
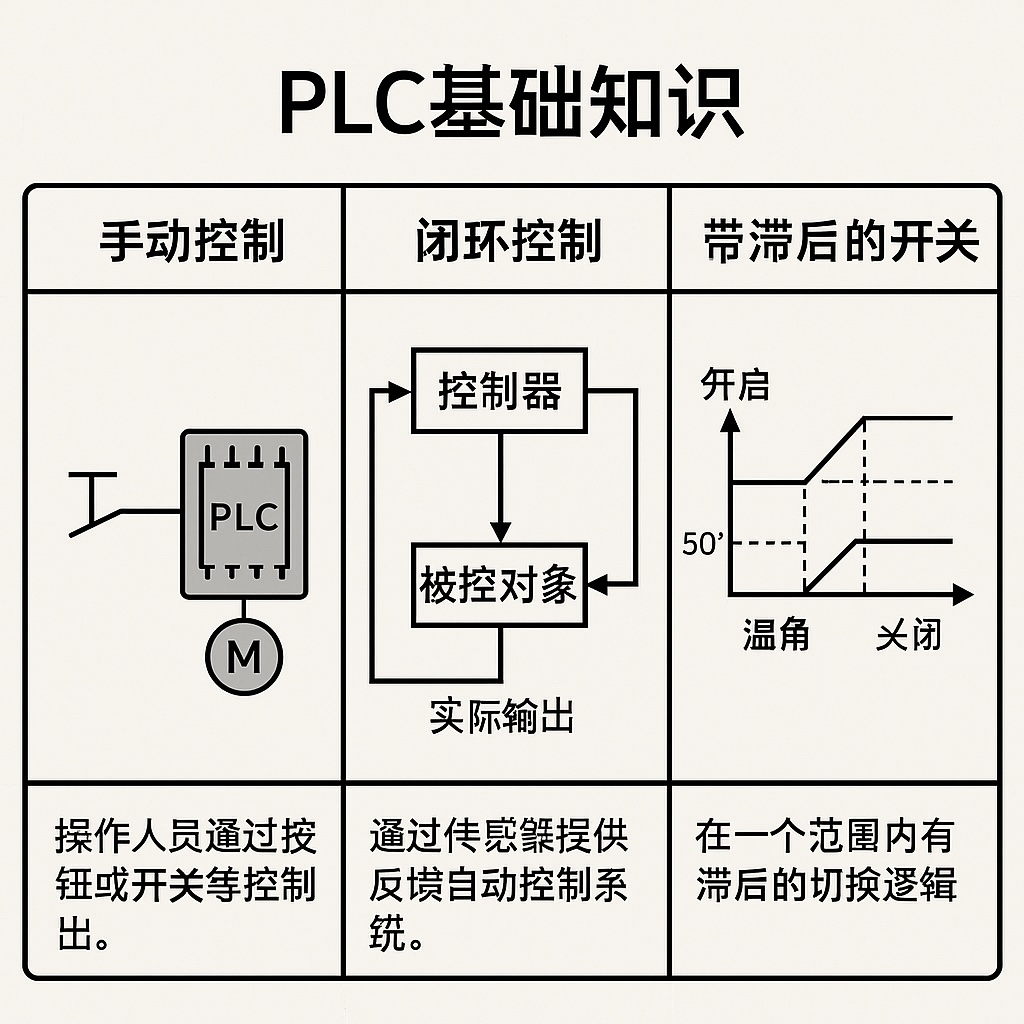
二、手动控制(Manual Control)
1. 定义
手动控制是指操作员通过按钮、开关等人工方式控制PLC的输出,而非PLC自动程序。
2. 特点
- 简单直观;
- 控制逻辑通常是“按下开关 -> 设备动作”;
- 多用于调试或特殊人工干预场景;
- 通常会设置“自动/手动切换”功能。
3. 实例说明
假设一个按钮控制电机启动:
|—-[I0.0 手动启动按钮]—-(Q0.0 电机输出)—-|
当按钮按下,PLC输入 I0.0 为真,输出 Q0.0 导通,电机运行。
补充:手动/自动切换逻辑常见做法:
|–[I0.1 手动模式] & [I0.0 手动启动]—-(Q0.0 电机)—-|
|–[~I0.1 自动模式] & [程序条件]——–(Q0.0 电机)—-|
三、闭环控制(Closed Loop Control)
1. 定义
闭环控制是指系统通过传感器检测实际输出,与设定值(目标值)对比后,由控制器(如PLC)调整控制量,使输出趋于设定值。
2. 特点
- 有“反馈”;
- 更加精准;
- 常用于温度、压力、位置、速度等连续量控制;
- 可能需要 PID 控制器模块支持。
3. 工作流程图:
设定值 –> 误差计算 –> 控制算法(如 PID) –> 控制输出 –> 被控对象 –> 反馈 –> 回到误差计算
4. 实例说明:温度控制
假设设定温度为 100°C,传感器实时检测温度,PLC 控制加热器。
误差 = 设定值 – 实际值
控制量 = PID(误差)
输出 = 控制加热器(Q0.1)
如使用西门子 PLC,可能用 PID_Temp 块实现。
四、带滞后的开关(Switch with Hysteresis)
1. 定义
带滞后的开关是一种避免输出频繁抖动的逻辑,常用于阈值判断。当输入值在某一范围内波动时,输出状态不会频繁切换。
2. 特点
- 稳定;
- 减少误动作;
- 常用于风扇启停、水位控制等场合。
3. 工作原理图示:
假设设定点为 50°C,滞后 5°C。
- 升温时:达到 50°C 才开启风扇;
- 降温时:降到 45°C 以下才关闭风扇。
输入温度 ↑ 到 50°C → 开启
输入温度 ↓ 到 45°C → 关闭
4. 梯形图实现逻辑:
|–[M0.0 风扇状态=OFF] & [温度 >= 50] –(SET M0.0 风扇ON)
|–[M0.0 风扇状态=ON ] & [温度 <= 45] –(RESET M0.0 风扇OFF)
|–[M0.0 风扇状态] ——————(Q0.2 风扇输出)
五、三者对比总结
| 项目 | 手动控制 | 闭环控制 | 带滞后开关 |
|---|---|---|---|
| 控制方式 | 人工按钮 | 自动调节 | 自动切换(带逻辑延迟) |
| 是否需要反馈 | 否 | 是 | 否(但需状态记忆) |
| 优点 | 简单,直观 | 精准,响应快 | 稳定,抗干扰 |
| 典型应用 | 手动开/关设备 | 温度/位置控制系统 | 风扇、水泵、报警等 |
六、实际应用场景举例
- 手动控制:调试时控制输送带开关;
- 闭环控制:恒温烘箱;
- 带滞后开关:控制冷风机启停,防止频繁开关机。

原创文章,作者:梦南圆,如若转载,请注明出处:https://mnyuan.cn/archives/18316
 微信扫一扫
微信扫一扫
