
一、步进电机概述
步进电机(Stepper Motor)是一种离散运动的执行元件,它能把电脉冲信号转化为角位移或线位移。在控制系统中,步进电机通常与数字控制器(如PLC、单片机、运动控制卡)结合使用,实现位置、速度、加速度的精准控制。
其最核心特征是:
每输入一个脉冲,电机就精确地旋转一个固定角度(步距角);这一点使它在开环控制系统中能达到“数字量→位移量”的直接映射。
二、结构与工作原理
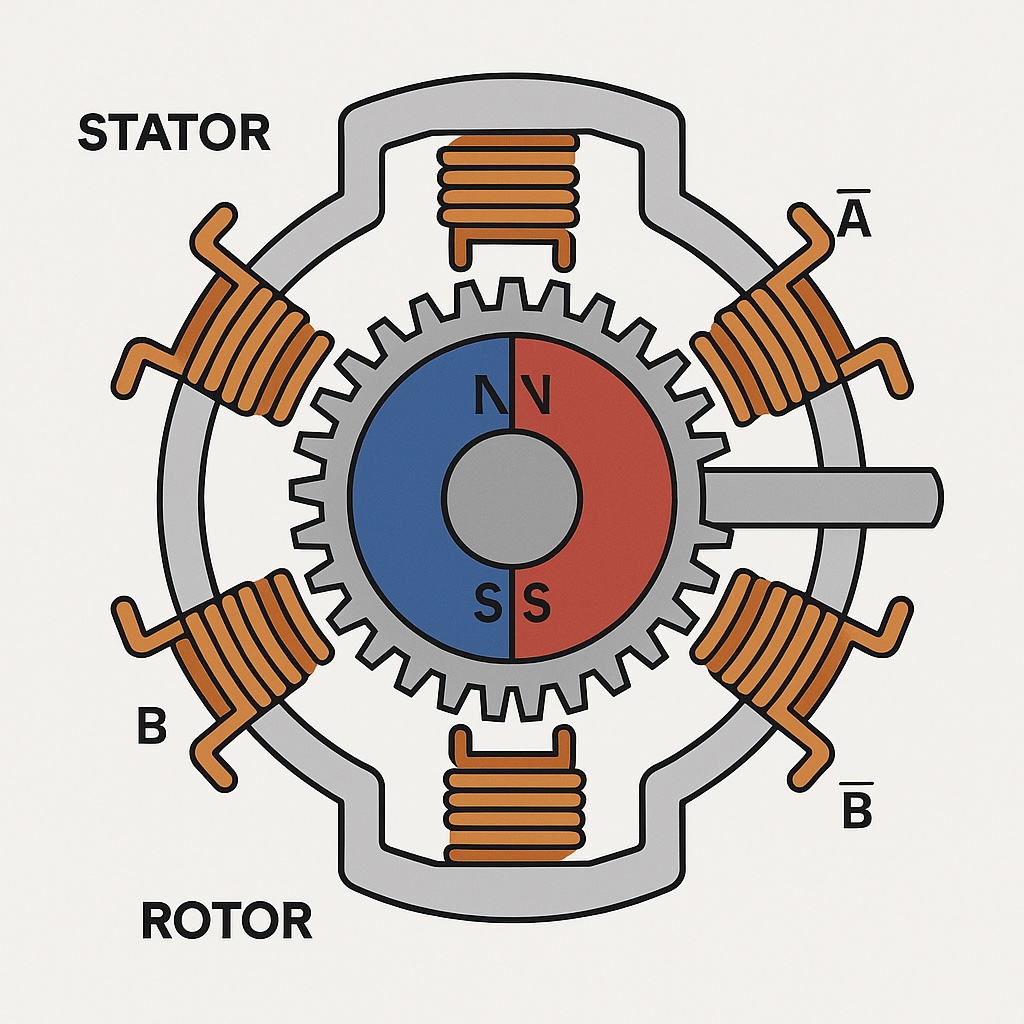
步进电机主要由以下几部分构成:
- 定子(Stator):固定部分,带有多组线圈绕组。
- 转子(Rotor):旋转部分,可能是永磁体或软磁体。
- 驱动器:将控制器输出的脉冲转换为具体的激磁序列,控制线圈通电顺序。
➤ 基本工作机制
以最常见的**两相混合式步进电机(1.8°步距角)**为例说明:
- 定子有两个绕组(A相、B相),每相两个线圈端。
- 转子是一个齿状永磁体(例如50齿,形成200步/圈,每步1.8°)。
- 每次对一个线圈组施加电流,形成磁场,吸引转子对应齿对齐。
- 通过交替通电(相序:A → B → -A → -B),转子依次跳转。
三、分类与对比分析
1. 按磁路结构分类
| 类型 | 特点 | 优劣势 |
|---|---|---|
| 永磁式(PM) | 转子为永磁体,结构简单,较低成本 | 步距角较大(7.5°~15°),适合低速场合 |
| 反应式(VR) | 转子为软磁体,利用磁阻变化产生转矩 | 扭矩小、低速抖动严重,但成本低、无磁损 |
| 混合式(HB) | 转子为永磁+软磁复合,齿形结构,高分辨率 | 精度高(1.8°或更小),力矩大,工业应用广泛 |
四、控制方式详解
步进电机的运行取决于驱动器对电机绕组的激励方式。主要有以下控制方式:
1. 励磁方式(Excitation Mode)
| 模式 | 描述 | 特点 |
|---|---|---|
| 单相励磁 | 每次仅激励一个绕组 | 扭矩小,振动大 |
| 双相励磁 | 每次同时激励两个绕组 | 扭矩大,功耗高 |
| 交替半步励磁 | 单-双相交替,步距角减半 | 相对平滑 |
| 微步驱动 | 通过正弦波或细分电流控制产生小步距 | 高精度,平滑运行,适合高端场合 |
2. 细分驱动(Microstepping)
通过电流细分控制(如将电流按正弦波比例分配给两个相邻相),可将每一步进一步划分为1/2、1/4、1/8、1/16甚至1/256步,优点:
- 显著提升运行平稳性
- 降低共振
- 提高分辨率(适合精密定位系统)
五、运动特性分析
1. 静态特性(静转矩)
- 指电机不转动时,对定子通电所能提供的最大保持扭矩。
- 决定了电机能否在负载下启动。
2. 动态特性
步进电机具有如下典型运行特性曲线:
- 启动频率:电机从静止启动不丢步所允许的最大频率。
- 运行频率范围:连续运行的频率范围。
- 最大响应频率:理论上电机可以达到但不稳定的最高频率。
由于惯性影响,步进电机通常采用加减速控制曲线,如:
- 抛物线加减速
- S形加减速
- 梯形加减速
六、共振问题与补偿
步进电机在低速运行(常在1~3 rps)时容易出现机械共振,原因包括:
- 结构谐振
- 驱动器电流切换产生电磁冲击
抑制共振方法:
- 采用微步驱动
- 增加阻尼机构(机械阻尼或外接减速机)
- 使用闭环控制系统(带编码器反馈)
七、闭环步进电机 vs 伺服电机
闭环步进电机结合了步进和伺服的优点:
- 通过加入编码器,形成闭环反馈,防止失步
- 保持步进结构的简洁,但在性能上接近伺服
| 对比项 | 步进电机(开环) | 闭环步进 | 伺服电机 |
|---|---|---|---|
| 控制结构 | 开环(无反馈) | 闭环(有反馈) | 闭环 |
| 精度 | 高(但会失步) | 更高 | 极高(无失步) |
| 响应速度 | 中 | 高 | 高 |
| 抗负载扰动能力 | 弱 | 中 | 强 |
| 成本 | 低 | 中 | 高 |
八、工程实践与注意事项
常见应用:
- 工业自动化(激光雕刻、数控、装配线)
- 医疗设备(注射泵、CT定位平台)
- 舞台灯光(云台灯、扫描灯)
- 消费级产品(3D打印机、机器人)
设计要点:
- 合理选择步距角和电机尺寸匹配负载需求
- 使用高品质驱动器进行细分控制
- 避免“急启急停”,使用加减速控制
- 必要时添加闭环反馈提升可靠性

原创文章,作者:梦南圆,如若转载,请注明出处:https://mnyuan.cn/archives/18110
赞 (0)
打赏
 微信扫一扫
微信扫一扫
微信扫一扫
了解失重秤
« 上一篇
2025年4月29日 pm9:33
西门子超声波物位计LU240配合巴歇尔槽测量明渠流量参数设置
下一篇 »
2025年5月2日 am10:44
